

Основоположник научного коммунизма Карл Маркс сформулировал следующее развернутое определение понятия машинного агрегата: «Всякое развитое машинное устройство состоит из трех существенно различных частей: машины-двигателя, передаточного механизма, наконец, машины-орудия или рабочей маши-ны» [2].
В сельскохозяйственном производстве в настоящее время применяются машины-орудия, имеющие различное назначение и разным образом сочетаемые в машинные агрегаты с тракторами (машинами-двигателями). Не составляют исключение в этом отношении и малогабаритные машинные агрегаты на базе передвижных средств .малой механизации, основное назначение которых состоит в ликвидации малопроизводительного ручного труда в условиях, когда нет возможности использовать традиционную сельскохозяйственную или транспортную технику и в силу этого превалирует ручной труд. К этим условиям относятся:
- обработка мелкоконтурных земельных участков: личные подсобные хозяйства рабочих, служащих и крестьян; опытные участки научных и учебных сельскохозяйственных учреждений, сортовые и. селекционно-семеноводческие участки, производственные участки защищенного грунта (рис. 1.1, см. вклейку) и т.д.;
- обработка «неудобных» земель, принадлежащих подсобным хозяйствам предприятий и учреждений, совхозам и колхозам, включая горные склоны, предгорные, лесные и лесохозяйственные участки. На рис. 1.2 (см. вклейку) показано, что повышение устойчивости агрегата достигается использованием строенных колес, а для удобства работы оператора штанга управления установлена под углом к продольной оси агрегата;
- загрузка и разгрузка бункеров, подъем, перемещение и транспортировка различных грузов (навоза, сена, почвы, удобрений, кормов и т. д.) в стесненных тепличных и животноводческих помещениях, на выгонах и скотных дворах (рис. 1.3, см. вклейку);
- опрыскивание (рис. 1.4, см. вклейку) и опыливание посевов и посадок, внесение удобрений, уборка и рас-чистка дорог от снега;
- кошение травы и заготовка сена, уход за газонами (рис. 1.5., см. вклейку) и подрезка насаждений, уборка листьев. Повышение производительности представленной на рис. 1.5 мотокосилки достигается установкой двух фронтальных и двух боковых косилок при мощности четырехтактного карбюраторного двигателя 8,8 кВт; ее колесная формула 3×2, заднее колесо — управляемое;
- транспортировка на короткие расстояния различных грузов, включая движение по дорожной сети страны (рис. 1.6, см. вклейку).
Необходимо отметить, что в отечественной практике терминология в области передвижных (мобильных) средств малой механизации (СММ) еще не установлена, поэтому в литературе бытуют различные термины, относящиеся к рассматриваемой группе самоходных малогабаритных машин: мини-тракторы, микротракторы, мотоагрикулы, мотороботы, мотоблоки, мотокультиваторы, тиллеры, мотоорудия и др. Многие из применяемых сейчас терминов являются чрезмерно громоздкими, например: «передвижные средства малой механизации», «малогабаритные тракторы», «пешеходные мини-тракторы», «малогабаритная техника», и поэтому они неудобны как в разговорной речи, так и в написании.
В связи с указанным мини-тракторами (миниатюрными тракторами), учитывая их схожее с обычными тракторами функциональное назначение, связанное с использованием их в составе передвижных машинно-тракторных агрегатов с тем или иным видом машин-орудий (рабочих органов), условимся называть самоходные малогабаритные колесные машины с двигателями мощностью до 12 кВт, предназначенные для работы в земледелии, животноводстве, на транс-порте и в коммунальном хозяйстве. Мини-тракторы для выполнения указанных работ агрегатируются с различ-ными прицепными или навесными машинами-орудиями и приспособлениями, что позволяет механизировать до нескольких десятков технологических операций. Всеми работами агрегатов на базе мини-трактора управляет один оператор.
Исходя из приведенного понимания термина «мини-тракторы» и перечисления условий, при которых решаются вопросы повышения производительности труда, классификация этого вида СММ должна базироваться прежде всего на следующих трех факторах:
- используемой схеме взаимодействия оператора с машиной и машины с объектом обработки или транспортировки;
-
общей конструктивной схеме машины, связанной с ее назначением;приспособленности к выполнению тех или иных тех-нологических операций в составе машинно-тракторного агрегата.
Принятая в книге для четкости изложения классификация различных типов мини-тракторов приведена на рис. 1.7. Она тесно связана с терминологией, установившейся в этой области сельскохозяйственной и коммунальной техники в нашей стране и за рубежом.
По общей конструктивной схеме мини-тракторы в настоящей работе делят на мотоорудия (специализированные самоходные орудия), мотоблоки, микротракторы (малогабаритные тракторы) и микропогрузчики (отнесение последних к мини-тракторам условно).
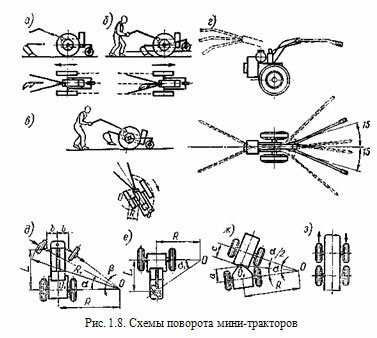
Мотоорудия (см. рис. 1.5) представляют собой специализированные (одноцелевые) самоходные орудия, управляемые (рис. 1.8, е) идущим рядом или сидящим на них оператором и предназначенные для выполнения только одной или нескольких технологически близких операций, хотя и существует тенденция расширить число этих операций. Эти специализированные мини-тракторы обладают цен-ными преимуществами (высоким качеством выполняемых технологических операций, малыми габаритными размерами и массой, высокой надежностью в работе, низкой стоимостью оборудования), которые обусловили их широкое распространение.
Мотоблоки (см. рис. 1.6) — это одноосные универсальные мини-тракторы, предназначенные для работы со сменными и разнородными прицепными или навесными орудиями и направляемые с помощью штанги управления оператором, идущим рядом с агрегатом или сидящим на прицепном орудии. Мотоблоки оборудуются, как правило, валом (или валами) отбора мощности для привода активных органов, а комплект разнохарактерных прицепных и навесных орудий к ним может насчитывать несколько десятков наименований.
Микротракторы (см. рис. 1.4) являются са-мыми малыми из ряда двухосных тракторов традиционной компоновки, которые для осуществления поворота могут иметь как шариирно сочлененную раму (рис. 1.8, ж), так и управление передними колесами (рис. 1.8, д). Естественным пределом масштаба уменьшения традиционных тракторов является необходимость размещения на микротракторе оператора, как правило на одиночном сидении (без кабины), высота которого не превышает 950 мм над грунтом. Микротрактор имеет большие, чем мотоблок, массу, производительность и стоимость, а следовательно, его использование оправдывается на более крупных земельных участках, таких, например, как подсобные хозяйства предприятий и организаций.
Он обычно снабжен гидро-объемной или электрической трансмиссией, обеспечивающей бесступенчатое регулирование скорости и плавную работу при выполнении технологических операций. Наличие независимого привода на все четыре колеса обеспечивает разворот микропогрузчика на 360° в любом на-правлении за счет вращения колес каждого борта в про-тивоположные стороны (рис. 1.8, з). Грузоподъемность микропогрузчиков может составлять от 0,2 до 0,4 т. Универсальный комплект быстросменных навесных орудий, закрепляемых на погрузчике фронтально, состоит из ковша, обратной лопаты, вилочных подхватов для грузовых поддонов и для навоза, шнекового погрузчика, отвала бульдозера, дорожной щетки, сцепного устройства, челюстного захвата для бревен и валочно-пакети-рующего механизма.
Дополнительными отличительными признаками мини-тракторов могут служить: общая масса и тяговое усилие на крюке (класс тяги), мощность и тип двигателя (бензиновые и дизели), колесная формула. Например, в последнем случае запись 4×2 обозначает, что микротрактор имеет четыре колеса, два из которых являются ведущими.
микротракторы и микропогрузчики могут иметь полную массу (с орудиями), достигающую 1000 кг, а микро-тюгрузчики и микротракторы с прицепной тележкой — выше 1200-1400 кг (см. табл. 1.2 и 1.3). Перечисленные особенности движения обусловили ис-пользование на мини-тракторах двух принципиальноо Личных типов управления поворотом: пешеходного и ездового (рис. 1.8). Первый из них (рис. 1.8, а-е) воз-можен только на одноосных (одноколесных) агрегатах, имеющих небольшие размеры и массу. Этот тип управ-ления унаследован от конных и ручных садово-огородных орудий и имеет в основе штангу управления (рис. 1.8, г), закрепленную на мотоблоке (мотоорудии) и имеющую одну или две рукоятки, воздействуя на которые руками, оператор, идущий сзади или рядом, управляет агрегатом.
Соединение мотоблока и сменного орудия (рис. 1.8, а) осуществляется перемещением мотоблока к орудию и покачиванием его вокруг ведущей оси, в результате чего достигается совмещение элементов сцепки (навески) мотоблока и орудия.
При движении агрегата в прямолинейном направлении оператор, воздействуя на рукоятки руками, предот-вращает возможные отклонения агрегата в сторону (рис. 1.8, б). Оператор при этом прикладывает к рукояткам управления усилия, которые пропорциональны величине различных сил реакций, действующих на рабочий орган со стороны обрабатываемой почвы. Например, при вспашке на мотоблок с плугом при движении одного колеса по дну борозды, а другого — по невспаханному полю воздействуют опрокидывающие силы, а также вы-глубляющие и заглубляющие моменты сил [9 ].
При работе с легкими мотоблоками, имеющими малую сцепную массу, основные усилия оператора направлены на преодоление буксования колес. Пешеходный тип управления в принципе допускает очень крутые (с радиусом R, рис. 1.8, е) повороты, когда центр поворота О находится в пятне контакта внутреннего колеса с почвой. Для одноколесного мотоблока, который представлен на рис. 6.4, радиус поворота равен нулю, когда центр поворота для него совпадает с пятном контакта единственной опоры (колеса).







